Previously, in Part II we discussed about running system commands and implementing our own built-in commands. In Part III, we explore signal handling.
What are signals?
When driving, one looks out for traffic signals, red or green and takes a decision based on it: to stop or to keep driving. But the traffic signals only come up after some intervals at crossroads and is not present continuously along the road.
We can somewhat apply this analogy to signals in the context of
computers as well. A signal is a software interrupt that is sent out
from an external event to a process. It may be sent to the process by
the kernel, by another process or by itself. A very common example is
SIGINT, which is the signal that is sent out when you hit Ctrl-C
to exit a program. Before going any further, let us take a look at the
following diagram:
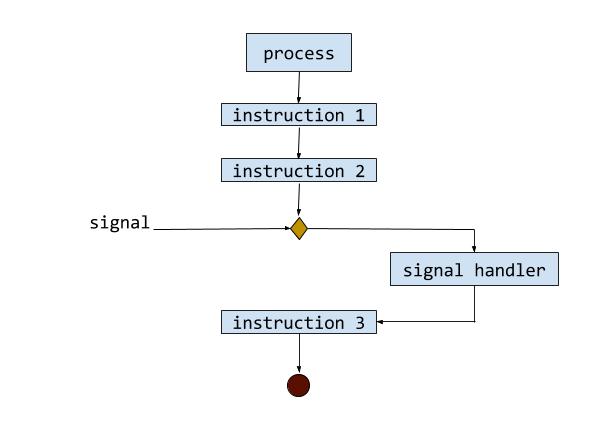
The process executes three instructions and terminatess. However,
after the second instruction, it receives a signal. At this point the
regular execution of the program is interrupted and is passed on to
the signal handler. The signal handler is a pre-defined function
which is invoked when the signal is received. It returns the process
to its normal execution flow, where it goes on to execute the third
instruction and exits. However, depending on the code in the signal
handler itself, instruction 3 might not be executed at all. For eg:
If the signal being sent is SIGINT (Ctrl-C), the program exits.
Also, it is not guaranteed that a signal interrupt will only occur
when a program is between instructions. It may occur when an
instruction is executing and in such a case the instruction will get
interrupted.
One important thing to note is that, while the main function runs in
its own thread the signal handler also runs in its own thread. Both
the threads belong to the same process though.
Edit: I misunderstood this line from The Linux Programming
Interface, section 21.1.2:
Because a signal handler may asynchronously interrupt the execution of a program at any point in time, the main program and the signal handler in effect form two independent (althought not concurrent) threads of execution within the same process.
I asked around on IRC[1] about this and it turns out that, “in effect” is the keyword here. It does not really create a thread for the signal handler. However, when a signal is delivered, the signal handler asynchronously interrupts a thread (in our case the main thread since we have a single threaded application). Once interrupted, the signal handler executes its own code, and the thread may resume execution unless the signal handler exits the program. The analogy to multiple threads helps to understand the flow of execution.
Signal handling
Now that we understand signals, let us run the
code for the shell we had from
Part II.
If you run the executable and run the command sleep 10 in the shell
and hit Ctrl-C before the command finishes, you will notice that
along with the command, our shell has quit as well.
$ gcc -lreadline shell_with_builtin.c && ./a.out
unixsh> sleep 10
^C
$
You will notice the same behaviour if you hit Ctrl-Z as well, which
generates the SIGTSTP signal. This stops the current running
process. Currently, the shell is reacting to the default signal
handlers set up by the operating system. The good news is that we can
customize this behaviour. We can use the function signal() defined in
signal.h:
#include <signal.h>
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler);The first argument to the function is the signal number. Each signal
has a predefined integer value assigned to it. This number is 2 for
SIGINT and 20 for SIGTSTP.
The second argument is a pointer to a signal handler. The signal
handler is a function that must accept an int as the only parameter
and return void as described by the typedef sighandler_t.
Let us write a minimal program to handle SIGINT:
#include <stdio.h>
#include <signal.h>
void sigint_handler(int signo) {
printf("Caught SIGINT\n");
}
int main() {
signal(SIGINT, sigint_handler);
while (1); /* Infinite loop */
}We run an infinite while loop here on typing Ctrl-C you will
notice the text Caught SIGINT printed to the terminal, but the
program will continue to run after that. You can stop it with
Ctrl-Z. Here’s the output from a sample run:
$ gcc sigint.c && ./a.out
^CCaught SIGINT
^CCaught SIGINT
^Z
[2]+ Stopped ./a.out
C provides two very useful macros that can be passed to the signal
function:
SIG_IGN: Ignores the signal. Usage:signal(SIGINT, SIG_IGN).SIG_DFL: Sets the default behaviour for the signal. This is useful when you want to reset the behaviour for a signal after having made some modifications. Usage:signal(SIGINT, SIG_DFL).
However, it is not possible to ignore, block or setup a custom handler
for SIGKILL and SIGSTOP. Blocking a signal means that the signal
will not be delivered to the process at all.
We will now use signal handling in our shell and modify our code by
adding a call to signal() just before the while loop:
...
int main() {
...
signal(SIGINT, SIG_IGN);
while (1) {
...The modified file is available
here. If you compile
and execute the binary and hit Ctrl-C, the shell does not quit
anymore. But if you run sleep 10 in the shell and hit Ctrl-C, the
command does not quit as well. The reason behind this is that when a
fork is called, apart from duplicating the parent process, it copies
the current signal configurations (also known as the signal
dispositions) as well. Since we are ignoring SIGINT in the parent,
the child also inherits the same property for SIGINT from its
parent and conveninently ignores the keyboard interrupt (Ctrl-C).
To prevent this, we will restore the default behaviour of SIGINT in
the child process after fork. Note that this must be done before the
call to execvp since it will replace the current program with the
program passed in the command.
...
child_pid = fork();
...
if (child_pid == 0) {
signal(SIGINT, SIG_DFL);
/* Never returns if the call is successful */
if (execvp(command[0], command) < 0) {
...The modified file is available here.
Signal masks
Each process has an attribute called the process signal mask which
is maintained by the kernel. Any signal that is added to the signal
mask gets blocked from being delivered in the future, unless the
signal is removed from it. This is useful when we want to block a
signal based on the application logic.
Now, let’s look at the following workflow for an example:
- A signal is delivered. The signal handler gets invoked and is in the middle of executing some instructions.
- The same signal is delivered again and the signal handler is invoked once again. The previous instance of the signal handler will get interrupted by a new instance of the signal handler.
This is not very desirable. To prevent the signal handler from interrupting itself, the original signal that invoked the signal handler gets added to the signal mask by default. This means that the same signal will not interrupt the current instance of the signal handler. And once the signal handler returns, the signal is removed from the mask.
Non local jumps
Currently, the shell does not do anything when it encounters a
Ctrl-C, while waiting for a command input. We would like to change
this behaviour to restart the while loop from the top and print a
newline. Effectively, Ctrl-C would mean a soft reset of the command
line. This brings us to the functions setjmp and longjmp, which
are used to perform a non local jump. This is equivalent of using a
goto statement to jump across scopes, except that the scope of a
goto is restricted to within a function. These functions are defined
in setjmp.h and their signatures look like this:
int setjmp(jmp_buf env);The setjmp() function sets a jump point and takes a buffer of type
jmp_buf which is used to store details like the stack pointer and
the instruction pointer. It returns 0 once the jump point has been
set.
void longjmp(jmp_buf env, int val);The longjmp() function uses the buffer which contains values saved by
setjmp() to determine the jump point in the program. Additionally it
takes an integer value, which is returned when the code returns to the
jump point. Here’s an example:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
#include <stdio.h>
#include <signal.h>
#include <setjmp.h>
#include <unistd.h>
static jmp_buf env;
void sigint_handler(int signo) {
longjmp(env, 42);
}
int main() {
signal(SIGINT, sigint_handler);
while (1){ /* Infinite loop */
if (setjmp(env) == 42) {
printf("Restart.\n");
}
printf("next iteration...\n");
sleep(2);
}
}
A few important things to note about the code above:
- The call to
signal()takes a pointer to thesigint_handler()function instead ofSIG_IGN (line 13). - When the code reaches
line 15for the first time,setjmp()is invoked and returns0. - After the signal handler has been registered, if we type
Ctrl-C, thelongjmp()function call is invoked where we pass42to it. The code jumps toline 15and this timesetjmp()returns the value that was passed inlongjmp()online 9, i.e.42. Thus the check evaluates totrue, which signifies that we reached this code from a non local jump. This is also referred to as afake returnbysetjmp().
If you compile and execute the binary, the output would be similar to:
$ gcc -lreadline -g setjmp_longjmp.c && ./a.out
next iteration...
^CRestart.
next iteration...
^Cnext iteration...
next iteration...
^Z
[6]+ Stopped ./a.out
But, Restart will be printed to the screen only the first time you
hit Ctrl-C. The reason behind this is that the first time the signal
handler is invoked for SIGINT, it blocks the signal and the call to
longjmp() does not unblock the signal since the signal handler never
really returns. As a result, SIGINT does not get delivered after the
first time.
To fix this problem, we have sigsetjmp() and siglongjmp(). The
function signatures are:
int sigsetjmp(sigjmp_buf env, int savesigs);
void siglongjmp(sigjmp_buf env, int val);They are similar to setjmp() and longjmp(), but they accept a buffer
of type sigjmp_buf instead of jmp_buf. Also, the sigsetjmp()
function accepts a flag savesigs. If value of this flag is non zero,
then sigsetjmp() saves the current process signal mask and restores it
when siglongjmp() is invoked. This means, that the signal which
initially gets blocked on invoking the signal handler, gets unblocked
as soon as siglongjmp() is invoked.
And here’s an example using these functions:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
#include <stdio.h>
#include <signal.h>
#include <setjmp.h>
#include <unistd.h>
static sigjmp_buf env;
void sigint_handler(int signo) {
siglongjmp(env, 42);
}
int main() {
signal(SIGINT, sigint_handler);
while (1){ /* Infinite loop */
if (sigsetjmp(env, 1) == 42) {
printf("Restart.\n");
}
printf("next iteration...\n");
sleep(2);
}
}
Note that the function call to sigsetjmp() on line 15 accepts an
extra parameter for the savesigs flag. Also, env is of type
sigjmp_buf. And if you compile and execute it you will notice that
Ctrl-C is accepted more than once, until you stop the program:
$ gcc -lreadline -g sigsetjmp_siglongjmp.c && ./a.out
next iteration...
^CRestart.
next iteration...
^CRestart.
next iteration...
^Z
[7]+ Stopped ./a.out
There’s one last catch about this arrangement though. We setup the
signal handler before setting a jump point. But there is no guarantee
that a signal will only be delivered after the jump point has been
set. And if this scenario takes place, our program will crash. To
avoid this we add a global flag that is false by default. Once the
jump point has been set, we set the flag to true and add a check on
this flag in our signal handler. If the flag is false, we skip the
call to longjmp() and return from the handler instead. Here’s our
updated signal handler and main function:
sigsetjmp_siglongjmp_with_check.c
...
static volatile sig_atomic_t jump_active = 0;
void sigint_handler(int signo) {
if (!jump_active) {
return;
}
siglongjmp(env, 42);
}
int main() {
signal(SIGINT, sigint_handler);
while (1){ /* Infinite loop */
if (sigsetjmp(env, 1) == 42) {
printf("Restart.\n");
}
jump_active = 1; /* Set the flag */
printf("next iteration...\n");
sleep(2);
}
}The flag jump_active is of type volatile sig_atomic_t. This is
essential, since this flag will be accessed asynchronously by multiple
threads of the process, i.e. the main thread and the signal handler
thread. The type guarantees atomic access to the variable across
multiple threads.
This brings us back to the first example,
sigint.c where we used printf in
the signal handler. printf is an async unsafe function. Which
means, that if the signal handler is invoked while another printf is
executing in a different part of the program, the output may be
erratic. We use printf only to explain the concept here, and it
should not be used in real life applications.
A better way for signal handling: sigaction
So far we have used the signal() function for setting signal
handlers. However, its implementation differs from system to system
and is generally not recommended to be used directly in application
code since its usage makes portability hard. The alternative is to use
the sigaction() function call.
This is also defined in signal.h, but before we look at its
signature, lets look at the definition of the struct sigaction (yes,
sadly they are both named the same):
struct sigaction {
void (*sa_handler)(int);
void (*sa_sigaction)(int, siginfo_t *, void *);
sigset_t sa_mask;
int sa_flags;
void (*sa_restorer)(void);
};The struct requires:
sa_handler: A pointer to the signal handler.sa_sigaction: A pointer to a signal handler that can access more information regarding the signal. Either one ofsa_handlerorsa_sigactionshould be used.sa_mask: An optional set of signals which are blocked while the signal handler is executing.sa_flags: Abitwise ORof config flags.sa_restorer: This is for internal use and should not be set.
Now let us look at the signature of the sigaction() function:
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);It accepts the signal number and two sigaction struct objects. The
first contains new configuration to be set, while the second is used
to save the current configuration before overwriting it with the new
one.
In our previous code, we replace signal(SIGINT, signal_handler by:
struct sigaction s;
s.sa_handler = sigint_handler;
sigemptyset(&s.sa_mask);
s.sa_flags = SA_RESTART;
sigaction(SIGINT, &s, NULL);The sigemptyset() function initializes the sa_mask attribute of
the struct with an empty set. We set the SA_RESTART flag on the
struct, which implies that if the signal handler is invoked while the
program is in the middle of a system call, the system call will be
restarted after the signal handler has finished its execution. And
finally, we call the sigaction() function with the signal and the
sigaction struct. We do not care about the previous configuration
for the signal and pass NULL instead of another sigaction struct
object. The example is available
here.
One last trivia
During this exercise contrary to my belief I realized that on typing
Ctrl-D no signal is generated like it does when we type
Ctrl-C. Rather it sends the EOF character. Since we’ve changed
Ctrl-C to not quit the shell, we implement Ctrl-D to do that
instead for us, which is similar to the behaviour of bash. The
following snippet helps us do this:
...
input = readline("rcsh> ");
if (input == NULL) { /* Exit on Ctrl-D */
printf("\n");
exit(0);
}
...The code for the shell with the concepts explained above is available here, but it is recommended that readers try to implement it themselves.
That brings us to the end of part III. All the code examples shown in this blog post are available here. In the next blog post we will see how to run background commands and perform job control. Stay tuned.
Acknowledgements
Once again thanks to Dominic Spadacene for pairing with me on this and to Saul Pwanson for being patient with my endless questions.
[1] - Also, thanks to valdis and derRichard on #kernelnewbies
(irc.oftc.net) for helping me understand the asynchronous nature of a
signal handler.